通過MPU-6050優化性能:設置,校準和應用
2024-04-25
9184
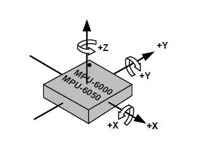
MPU-6050 是世界上第一個集成的6軸運動處理組件,該組件集成了3軸陀螺儀,3軸加速度計和可擴展的數字運動處理器(DMP)。使用它的目的是獲得要測量的物體的傾斜角(例如四輪驅動器,平衡汽車),即X,Y和Z軸,即螺距角,側傾角和偏航角。我們通過I2C接口讀取MPU-6050的六個數據(三軸加速AD值和三軸角速度AD值)。姿勢融合處理後,可以計算螺距,滾動和偏航角。作為測量值的定向參考,傳感器坐標方向的定義如下圖所示,該圖遵循右手坐標系的原理(即,右拇指指向x-的正方向軸,食指指向Y軸的正方向,中指指向Z軸的正方向。
目錄
MPU-6050憑藉其專用的I2C傳感器總線,能夠直接從外部3軸指南針接收輸入,從而提供了完整的9軸MotionFusionFusionFusion™輸出。它消除了組合陀螺儀和加速器時間軸之間的差異問題,與多組分解決方案相比,包裝空間大大降低了。當連接到三軸磁力計時,MPU-60x0能夠為其主I2C或SPI端口提供完整的9軸運動融合輸出(請注意,SPI端口僅在MPU-6000上可用)。
替代方案和等效物
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050的製造商
MPU-6050的製造商是TDK。在TDK的兩個創始人Kato博士和Takei博士在東京發明了鐵礦之後,他們創立了東京Denkikagaku Kogyo K.K.在1935年。作為全球電子行業品牌,TDK始終在電子原材料和電子組件的領域保持著主導地位。TDK的全面且創新驅動的產品組合涵蓋了被動組件,例如陶瓷電容器,鋁電解電容器,膜電容器,磁性產品,高頻組件,壓電和保護設備,以及溫度和壓力,溫度和壓力,電氣和保護設備(例如溫度,壓力)磁性和MEMS傳感器)等。此外,TDK還提供電源和能源設備,磁頭和其他產品。它的產品品牌包括TDK,EPCOS,Invensense,Micronas,Tronics和TDK-Lambda。
MPU-6050的內部框圖
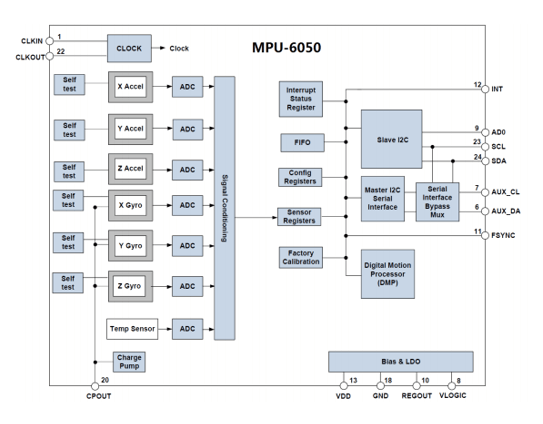
其中,SCL和SDA是連接到MCU的IIC接口,MCU通過此IIC接口控制MPU-6050。還有一個IIC接口,即AUX_CL和AUX_DA。該界面可用於連接外部從設備,例如磁傳感器,形成九軸傳感器。Vlogic是IO端口電壓。該引腳至少可支持1.8V。我們通常將其直接連接到VDD。AD0是從屬IIC接口的地址控制引腳(連接到MCU)。該引腳控制IIC地址的最低位。如果連接到GND,則MPU-6050的IIC地址為0x68;如果連接到VDD,則為0x69。請注意,此處的地址不包括最低的數據傳輸(最低位用於表示讀寫操作)。在MWBalancedSTC15上,AD0連接到GND,因此MPU-6050的IIC地址為0x68(不包括最低位)。
初始化IIC接口
MPU-6050使用IIC與STC15進行通信,因此我們需要先初始化連接到MPU-6050的SDA和SCL數據線。
重置MPU-6050
此步驟將MPU-6050中的所有寄存器還原為其默認值,這是通過將1至Bit7編寫為Power Management寄存器1(0x6b)的Bit7來實現的。重置後,電源管理寄存器1將恢復為默認值(0x40),並且該寄存器必須隨後設置為0x00,以喚醒MPU-6050並將其放入正常的工作狀態。
設置角速度傳感器(Gyro)和加速度傳感器的全尺度範圍
在此步驟中,我們分別通過陀螺儀配置寄存器(0x1b)和加速度傳感器配置寄存器(0x1C)設置兩個傳感器的全尺度範圍(FSR)。通常,我們將陀螺儀的全尺度範圍設置為±2000DPS,並將加速度計的全尺度範圍設置為±2G。
設置其他參數
在這裡,我們還需要配置以下參數:關閉中斷,禁用AUX I2C接口,禁用FIFO,設置陀螺儀採樣率,並配置數字低通濾波器(DLPF)。由於我們不使用中斷讀取本章中的數據,因此需要關閉中斷功能。同時,由於我們沒有使用AUX I2C接口來連接其他外部傳感器,因此我們還需要關閉此接口。可以通過中斷啟用寄存器(0x38)和用戶控制寄存器(0x6a)來控制這些功能。MPU-6050可以使用FIFO存儲傳感器數據,但是我們在本章中尚未使用它,因此所有FIFO通道都需要關閉。這可以通過FIFO啟用寄存器(0x23)來控制。默認情況下,此寄存器的值為0(即禁用FIFO),因此我們可以直接使用默認值。陀螺儀的採樣率由採樣率分隔寄存器(0x19)控制。通常,我們將此採樣率設置為50。數字低通濾波器(DLPF)的配置通過配置寄存器(0x1a)完成。一般而言,我們將將DLPF設置為帶寬的一半,以平衡數據的準確性和響應速度。
配置系統時鐘源並啟用角速度傳感器和加速度傳感器
系統時鐘源的設置取決於電源管理寄存器1(0x6b),其中此寄存器的最低位確定了時鐘源的選擇。默認情況下,這三個位設置為0,這意味著系統使用內部8MHz RC振盪器作為時鐘源。但是,為了提高時鐘精度,我們經常將其設置為1,然後選擇X軸陀螺儀PLL作為時鐘源。另外,啟用角速度傳感器和加速度傳感器也是初始化過程中的重要一步。這兩個操作均通過電源管理寄存器2(0x6C)實施。只需將相應位設置為0即可激活相應的傳感器。完成上述步驟後,MPU-6050可以輸入正常工作狀態。那些不是專門設置的寄存器將採用系統預設的默認值。
MPU-6050如何工作?
陀螺儀傳感器
傳感器配備了陀螺儀內部,由於陀螺效應,該傳感器將始終與初始方向平行。因此,我們可以通過檢測陀螺儀與初始方向的偏差來計算旋轉方向和角度。
加速度計傳感器
加速度計的傳感器是一種可以測量加速度的設備,並且根據壓電效應的原理起作用。在加速過程中,傳感器測量施加到質量塊上的慣性力,然後使用牛頓的第二定律計算加速度值。
數字運動處理器(DMP)
DMP是MPU6050芯片中的數據處理模塊,該模塊具有內置的Kalman濾波算法,用於從陀螺儀和加速度計傳感器中獲取數據並處理輸出四項。此功能大大減少了外圍微處理器的工作量,並避免了繁瑣的過濾和數據融合過程。
筆記:
四元素:四元素是簡單的超複雜數字。複數由實數加上虛構單元i組成,其中i^2 = -1。
MPU-6050在哪裡使用?
- 玩具
- 手機和便攜式遊戲
- 基於運動的遊戲控制器
- Blurfree™技術(用於視頻/靜止圖像穩定)
-iarsign™技術(用於安全/身份驗證)
- Instantgesture™IG™手勢識別
- 健康,健身和運動的可穿戴傳感器
- 支持運動的遊戲和應用程序框架
- MotionCommand™技術(用於手勢短切)
- 基於位置的服務,興趣點和死亡估算
- Internet連接的DTV和設置頂部框的3D遙控器,3D小鼠
- TouchAnyWhere™技術(“無觸摸” UI應用程序控制/導航)
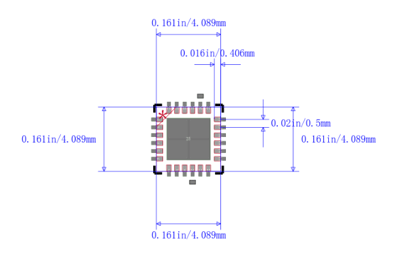
MPU-6050包裝
如何降低MPU-6050的噪聲?
我們可以採取以下方法來降低MPU-6050的噪聲。
使用校準的傳感器
校準MPU-6050的加速度計和陀螺儀可以消除傳感器本身的偏差和誤差,從而降低噪聲的影響。校準過程通常包括兩個階段:靜態校準和運動校準。
硬件過濾過程
將濾波器電容器添加到MPU-6050的電源線可以減少電源噪聲對傳感器的影響。同時,在PCB佈局期間,我們應該嘗試將MPU-6050遠離潛在的干擾來源,例如高頻信號線和高功率組件。
軟件過濾處理
從MPU-6050收集原始數據後,我們可以添加一個軟件過濾鏈接以預處理初始數據,以消除噪聲引起的干擾。常用的軟件過濾方法包括平均過濾,中值過濾,卡爾曼過濾等。
使用內部低通濾波器
MPU-6050具有內部集成的數字低通濾波器,可用於通過設置其截止頻率來減少高頻噪聲。具體而言,我們可以通過修改MPU-6050的配置寄存器來消除由A/D採樣引起的高頻噪聲來設置數字過濾器的截止頻率。
基於MPU-6050的運動軌跡計算
MPU-6050是六軸加速度計和陀螺儀傳感器,可用於測量物體的運動和態度。基於MPU-6050的運動軌跡計算可以通過以下步驟實現:
第一步是讀取傳感器數據。我們需要使用適當的驅動程序和庫功能讀取MPU-6050傳感器的加速度計和陀螺儀數據。這些數據通常以數字格式輸出,因此需要進行一些轉換和校準工作才能將它們轉換為物理單位的實際測量。
第二步是計算加速度。首先,我們需要處理從加速度計的數據來得出每個軸中對象的加速度。隨後,為了計算每個軸中對象的速度和位移,我們需要集成加速度數據。在此過程中,通常使用數值集成技術,例如Euler的方法或Lunger-Kutta方法,以確保位移計算的準確性。
第三步是計算角速度。使用陀螺儀數據,可以計算每個軸中對象的角速度。同樣,需要校準並轉換該數據以獲得實際物理單元中的角速度。
第四步是計算旋轉。通過集成角速度數據,可以計算每個軸中對象的旋轉角度。這可以使用數值集成技術,例如Euler的方法或longe-kutta方法來計算角度。
第五步是合併數據。我們將來自加速度計和陀螺儀的數據組合在一起,以獲得對象的完整態度和位置信息。這可以使用算法(例如基於Quattrnion的姿態求解器或Euler Angle求解器)來完成。
第六步是可視化結果。我們將計算的對象運動軌跡轉換為3D坐標系中的一組點,並使用適當的可視化工具顯示它,以更直觀地理解對象的運動軌跡和態度變化。
常見問題[常見問題]
1. MPU6050的準確性如何?
獲得的結果表明,足夠的準確性小於1%和可靠性,可確保電梯軸的適當尺寸和電梯行業的高標準。
2.如何讀取MPU6050的數據?
要讀取內部MPU6050寄存器,主台將發送起始條件,然後發送I2C從地址和寫入位,然後是將要讀取的寄存器地址。
3. MPU6050在哪裡使用?
在可穿戴健康,健身跟踪設備中。在無人機和四輪驅動器中,MPU6050用於位置控制。用於控制機器人臂。手勢控制設備。
4. MPU6050是IMU嗎?
MPU6050 IMU傳感器塊讀取連接到硬件的MPU-6050傳感器的數據。塊沿傳感器軸的軸輸出加速度,角度速率和溫度。
5. MPU6050的處理是什麼?
這是MPU6050的板載處理器,它結合了來自加速度計和陀螺儀的數據。DMP是使用MPU6050的關鍵,稍後將詳細說明。與所有微處理器一樣,DMP需要固件才能運行。
功能測試。最高成本效益的產品和最好的服務是我們永恆的承諾。
 探索NRF24L01通信芯片的功能和應用
探索NRF24L01通信芯片的功能和應用
2024-04-25
 MMBT3904 NPN晶體管:其規格,綜合申請指南和MMBT3904與MMBT5551
MMBT3904 NPN晶體管:其規格,綜合申請指南和MMBT3904與MMBT5551
2024-04-25
熱門零件編號
 GRM0335C2A5R0CA01D
GRM0335C2A5R0CA01D C1005X5R1H223K050BB
C1005X5R1H223K050BB C0603C0G1E3R4C030BG
C0603C0G1E3R4C030BG GJM1555C1H9R8BB01D
GJM1555C1H9R8BB01D LMK107SD153KA-T
LMK107SD153KA-T 1812JC470JAT1A
1812JC470JAT1A 593D107X9010C2TE3
593D107X9010C2TE3 IRG4PSH71UD
IRG4PSH71UD EPM7128SQC100-10F
EPM7128SQC100-10F MAX14780EESA+T
MAX14780EESA+T
- MAX14900EAGM+CKT
- AS4C128M16D3LA-12BIN
- MIC2951-02BM
- XBP24-AUI-001J
- PM20CTM060-10
- TL084CNSRG4
- XCVU13P-L2FLGA2577E
- STM32F429ZIT6E
- AD5326BRUZ
- T491X226K035ZTPV10
- T491B475K016AT2478
- T491A334K025ATAUTO
- LM339DTBR2G
- 2SC4027S-H
- T491D476K025AT7280
- HMC389LP4E
- LTC2494CUHF#PBF
- LT5400AHMS8E-1#PBF
- LMV339M
- SN65DP159RGZT
- 74LVC1G32GM
- ACPM-5001-SE1
- BCM3440KQTEG
- CAT93C46S-26490T
- CD4071BCMX
- PD-64008
- SY100ET111UTG
- TSA5055T/C3
- C8051F581-AQ
- K521H12ACH-B050
- NCX2220GT
- SK6612AZRC
- CY7C131-55NI
- TE28F320C3B90
- R7F701406EABG-C
- ML86V8201BTBZ07AL
- MB89016PF-G
- VN5T006ASP-E
- WJ2EDGKM-5.08-8P